

System Overview
Pergala bicîhkirina giraniya bê rawestan di serî de fonksiyonên serîlêdana karsaziyê ji bo stasyonên tespîtkirina zêdebarkirina li kêleka rê ya sabît peyda dike. Ew bi giranî rêbazên bicîhkirina bê-têkilî dipejirîne, ku xwe dispêre alavên pêş-teftîşê da ku tespîtkirin û giraniya wesayîtên veguheztina kargoyê temam bike. Pergal dikare agahdariya zêdebarkirî û daneyên navnîşa reş bi navgîniya tabloyên peyamên guhêrbar biweşîne, û ew pêvajoyên karsaziyê bi dîjîtalî bi nermalava qereqola tespîtkirina barkirina zêde ya li kêleka rê ya sabît îdare dike.
Layout Tîpîk
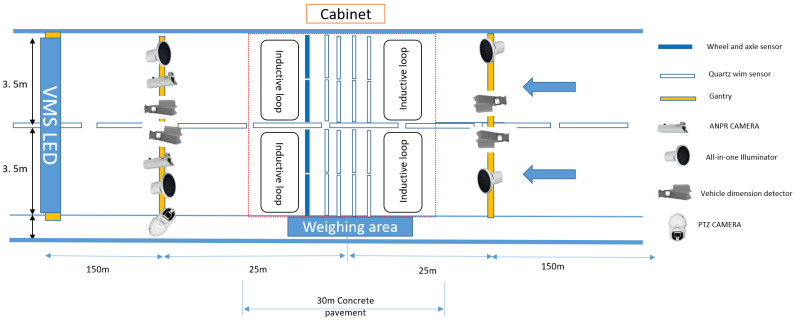
Danasîna fonksiyonê
●Ji bo wesayîtên ku di rêça otobana sereke re derbas dibin, pergala pîvandinê dikare bixweber giraniya giştî ya wesayîtê, giraniya eksê, hejmara eksê û tekeran, dûrahiya eksê, leza wesayîtê, û leza wesayîtê tespît bike.
●Pergal dikare bi duristî û bi bandor wesayîtan ji hev veqetîne û şert û mercên ajotinê yên ne asayî yên wekî rêzgirtina wesayîtan û guheztina rêzê bi rê ve bibe, pêwendiya di navbera wesayît û daneyan de misoger bike.
●Pergal xwedî fonksiyonek tamponkirina otomatîkî ye, ku dihêle ew hejmarek daneyan hilîne. Ger veguheztina daneyê li ser komputera bargiraniyê ya li kêleka rê têk neçe, pergal dikare daneyan ji nû ve bişîne, yekta û yekparebûna daneyê misoger bike.
●Agahdariya pîvandinê dikare bi navgîniya daneya diyarkirî ve ji komputera kontrolê ya paşîn re were veguheztin.
●Pergal xwedan fonksiyonek xwe-teşhîskirina xeletiyê ye, û gava ku têkçûnek alav an xetê çêbibe, pergal dikare agahdariya xeletiya têkildar bistîne.
●Pergal dikare hewcedariyên xebata bênavber, domdar û hemî hewayê di moda bêserûber de bicîh bîne.
●Ji bo wesayitên nîv-romokî yên bi plaqeyên pêş û paşîn ên nakokbar, pergal alavên girtina wesayîta paşîn zêde dike da ku hem plaqeya pêş û hem jî plakaya trailer bigire.
●Pergal dikare du wêneyên taybetmendiya panoramîk ên wesayîtên barkirî (tevî dîmena tevahî ya wesayîtê, plakaya lîsansê, reng, model û taybetmendiyên erdnîgarî yên berbiçav) bigire.
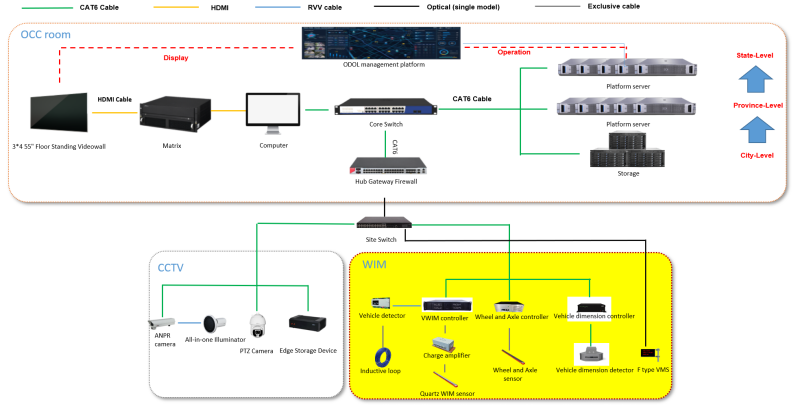
Pergalên Pergalê
Pergala bicîhkirina giraniya bê rawestan ji pergalek pîvandina bilez a dînamîkî, pergala veqetandina wesayîtê, pergala nasîna wesayîtê, pergala çavdêriya vîdyoyê ya li kêleka rê, pergala serbestberdana agahdariya li kêleka rê, û pergala veguheztina yekbûna agahdariya li kêleka rê pêk tê.
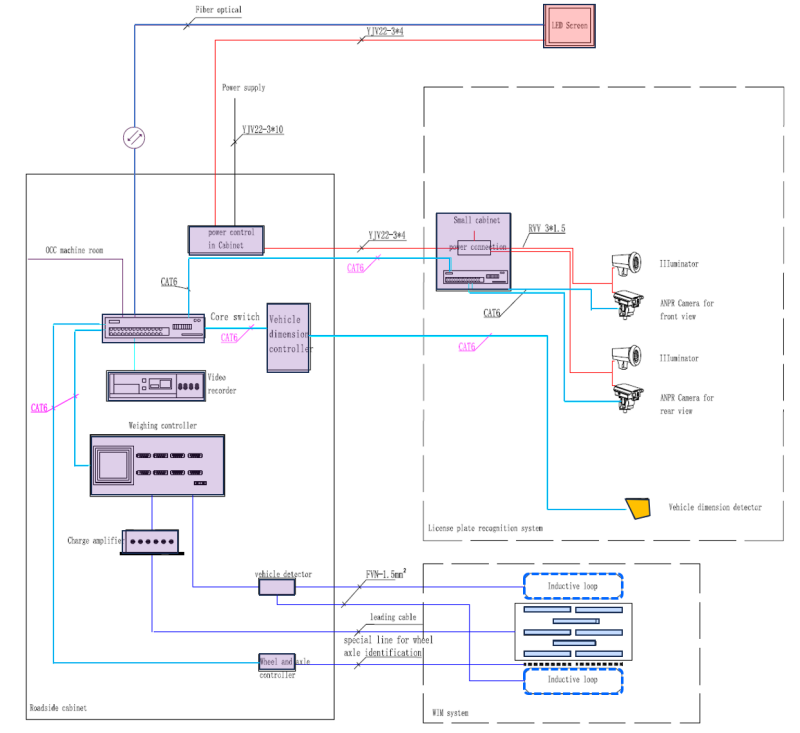
Diagrama Pêvajoya Pêvajoya Bicîhkirina Giraniyê ya bê rawestan
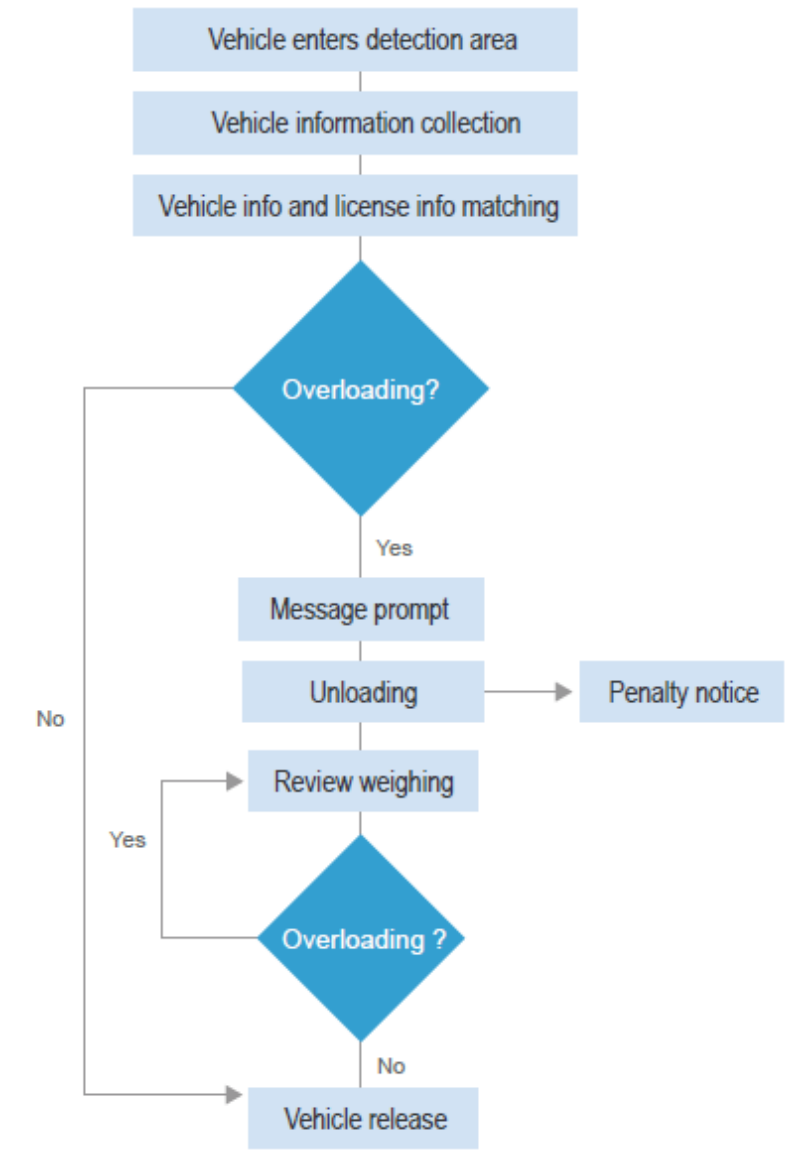
Diagrama Topolojiya Sîstemê
Nîşaneyên Teknîkî yên Sereke
● Barkirina herî zêde (an koma eksê): 40,000 kg
● Barkirina eksê herî kêm (an koma eksê): 500 kg
●Nirxa mezûnbûnê: 50 kg
● Rêzeya leza tespîtkirina dînamîk: 0,5–200 km/h
● Asta rastbûna giraniya dînamîk: Pola 5
● Rêjeya girtina plaqeya rojê: ≥98%
● Rêjeya girtina plaqeya lîsansê ya şevê: ≥95%
●Naskirina plakaya lîsansê û rastbûna berhevdana daneya giraniyê: ≥99%

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Ofîsa Chengdu: No. 2004, Yekîneya 1, Avahî 2, No.
Ofîsa Hong Kongê: 8F, Avahiya Cheung Wang, Kolana San Wui 251, Hong Kong
Dema şandinê: Sep-13-2024




